


ძალის მომენტი რაიმე წერტილის მიმართ არის ამ წერტილიდან ძალის მოდების წერტილამდე გავლებული რადიუს ვექტორისა და ძალის ვექტორის ვექტორული ნამრავლი
 |
(1) |
ძალის მომენტის მოდული
 |
(2) |
ან სხვანაირად
| M=Fl | (3) |
სადაც l არის ძალის მხარი და წარმოადგენს უმოკლეს მანძილს ბრუნვის ღერძიდან ძალის მოქმედების წრფემდე.
ბრუნვის ღერძის მიმართ მატერიალური წერტილის ინერციის მომენტი არის
 |
(4) |
სადაც mi არის მატერიალური წერტილის მასა, ხოლო ri არის მატერიალური წერტილის რადიუსი ბრუნვის ღერძიდან.
მყარი სხეულის ინერციის მომენტი მისი რომელიმე ღერძის მიმართ არის
 ან ან  |
(5) |
სადაც ρ არის ნივთიერების სიმკვრივე; dV - ელემენტური მოცულობა. ინტეგრირებით შეიძლება მოიძებნოს მარტივი ფორმის სხეულების ღერძული ინერციის მომენტები, როცა ბრუნვის ღერძი მასათა ცენტრზე გადის.
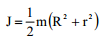
| R რადიუსის სავსე ცილინდრი |  |
 |
| R რადიუსის დისკო |  |
 |
| R გარე რადიუსისა და r შიდა რადიუსის მქონე მილი | 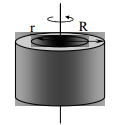 |
 |
| R რადიუსის თხელკედლიანი ცილინდრი (მანჟეტი) | 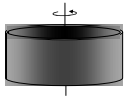 |
 |
| R რადიუსის სავსე ბირთვი |  |
 |
| R რადიუსის სფერული გარის (თხელი სფერული ფენა) |  |
 |
| l სიგრძის წვრილი ძელაკი | 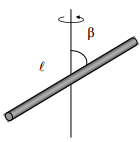 |
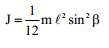 |
| სწორკუთხა პარალელეპიპედი |  |
 |
| კონუსი | 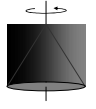 |
 |
| პირამიდა | 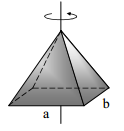 |
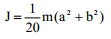 |
შტეინერის თეორემის თანახმად, სხეულის ინერციის მომენტი ნებისმიერი ღერძის მიმართ ტოლია ამ ღერძის პარალელური ღერძის მიმართ მისი ინერციის მომენტის ჯამისა სხეულის მასისსა და ამ ღერძებს შორის მანძილის კვადრატის ნამრავლთან:
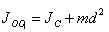 |
(6) |
სადაც m – სხეულის მასაა, d – ღერძებს შორის მანძილი.
მატერიალური წერტლის იმპულსის მომენტი რაიმე ღერძის მიმართ არის ამ ბრუნვის ღერძიდან ამ წერტილამდე გავლებული რადიუს-ვექტორის ვექტორული ნამრავლი იმპულსის ვექტორზე.
 |
(7) |
სხეულის იმპულსის მომენტი (მოძრაობის რაოდენობის მომენტი) რაიმე ღერძის მიმართ
 |
(8) |
ბრუნვითი მოძრაობის დინამიკის ძირითადი კანონი:
 |
(9) |
სადაც M – სხეულზე მოდებული ძალების ჯამური მომენტია.
თუ J=const მაშინ
 |
(10) |
მბრუნავი სხეულის უძრავი ღერძის მიმართ ბრუნვის კინეტიკური ენერგია
 |
(11) |
სრული კინეტიკური ენერგია
 |
(12) |
სადაც vc მასათა ცენტრის გადატანითი მოძრაობის სიჩქარეა.
გარე ძალების მუშაობა მყარი სხეულის ბრუნვის დროს:
 |
(5.13) |
1) გარე ძალების არარსებობის შემთხვევაში რაკეტას დროის რაღაც t მომენტში აქვს მასა  და უძრავი ათვლის სისტემის მიმართ მოძრაობს \(v\) სიჩქარით, მაშინ დროის
და უძრავი ათვლის სისტემის მიმართ მოძრაობს \(v\) სიჩქარით, მაშინ დროის  მომენტში მისი მასა შემცირდება
მომენტში მისი მასა შემცირდება  -ით და სიჩქარე \(\mathrm{d}v\)-ით გაიზრდება. ამავე დროში dm აირი გამოიტყორცნება საპირისპირო მიმართულებით უძრავი ათვლის სისტემის მიმართ
-ით და სიჩქარე \(\mathrm{d}v\)-ით გაიზრდება. ამავე დროში dm აირი გამოიტყორცნება საპირისპირო მიმართულებით უძრავი ათვლის სისტემის მიმართ  სიჩქარით. მაშინ იმპულსის მუდმივობის კანონით გვაქვს:
სიჩქარით. მაშინ იმპულსის მუდმივობის კანონით გვაქვს:

გარდავქმნათ განტოლება (1) და გავითვალისწინოთ  სიმცირე, მივიღებთ:
სიმცირე, მივიღებთ:

გავყოთ ამ გამოსახულების ორივე მხარე -ზე, მივიღებთ:

ამ გამოსახულების გაინტეგრირებით გვექნება

\(v_{1}=-uln(m_{0}-\mu t)+uln(m_{0})=uln(\frac{m_{0}}{m_{0}-\mu t})\)
2) ერთგვაროვან გრავიტაციულ ველში გარდა \(F=\mu u\) რეაქტიული ძალისა (იხ. განტ(2)) უნდა გავითვალისწინოთ სიმძიმის ძალა  , რომელიც რეაქტიული ძალის საპირისპიროდ არის მიმართული.
, რომელიც რეაქტიული ძალის საპირისპიროდ არის მიმართული.

აქედან
\(\mathrm{d}v=\left ( \frac{\mu u}{m_{0}-\mu t}-g \right )\mathrm{d}t\) (7)
გავაინტეგროთ ეს გამოსახულება და მივიღებთ:
\(v_{2}=uln(\frac{m_{0}}{m_{0}-\mu t})-gt\) (8)
გარე ძალების ველის უგულებელყოფით გაკეთებული ფარდობითი ცდომილება ტოლია:
\(e=\frac{v_{1}-v_{2}}{v_{1}}=\frac{gt}{uln\frac{m_{0}}{m_{0}-\mu t}}\) (9)
ჩავსვათ ამოცანის მონაცემები ფორმულებში (5), (8) და (9), მივიღებთ:
\(v_{1}\)=134 მ / წმ ; \(v_{2}\) =124 მ / წმ ; e= 7,3%.
 М მასის მქონე ბირთვის სიჩქარე დაჯახებამდე იყოს
М მასის მქონე ბირთვის სიჩქარე დაჯახებამდე იყოს  , ხოლო დაჯახების შემ დეგ
, ხოლო დაჯახების შემ დეგ  , ამასთან მეორე ბირთვის სიჩქარე გახდა
, ამასთან მეორე ბირთვის სიჩქარე გახდა  . მაშინ იმპულსის შენახვის კანონი ვექტორულად ასე გამოიყურება
. მაშინ იმპულსის შენახვის კანონი ვექტორულად ასე გამოიყურება










 განვიხილოთ ძელაკის შუალედური მდებარეობა, როცა ძელაკის х სიგრძე უკვე გადასულია მეორე ზედაპირზე. რათა შევასრულოთ მინიმალური მუშაობა ძელაკის გადასატანად, მას უნდა მოვდოთ ჰორიზონტული \(\vec{F}\) ძალა, რაც მოდულით ტოლი იქნება პირველი და მეორე ზედაპირების მხრიდან მოქმედი \(\vec{F}_{1fr}\) და \(\vec{F}_{2fr}\) ხახუნის ძალების ჯამისა
განვიხილოთ ძელაკის შუალედური მდებარეობა, როცა ძელაკის х სიგრძე უკვე გადასულია მეორე ზედაპირზე. რათა შევასრულოთ მინიმალური მუშაობა ძელაკის გადასატანად, მას უნდა მოვდოთ ჰორიზონტული \(\vec{F}\) ძალა, რაც მოდულით ტოლი იქნება პირველი და მეორე ზედაპირების მხრიდან მოქმედი \(\vec{F}_{1fr}\) და \(\vec{F}_{2fr}\) ხახუნის ძალების ჯამისა